A year after the Galileo OSNMA authentication service was declared operational, receiver manufacturers worldwide are embedding it into commercial products, extending real-world protection against GNSS spoofing to a wide range of applications.
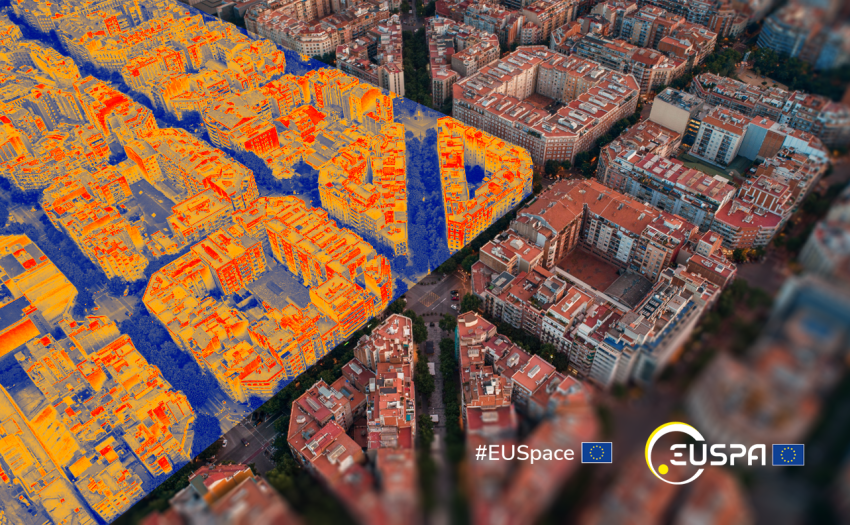
As July brings renewed heatwaves and temperatures above 40 °C in southern Europe, Copernicus Sentinel-3 data show how space-based observations support decisions on extreme heat and climate resilience.
Innovative space-based services, supported by EUSPA, are helping companies across Europe make travel and tourism safer, more sustainable and more enjoyable.
Marking a decade of service and three years of EUSPA’s Front Desk operations, EU SST is a cornerstone of the European Union (EU)’s space situational awareness, enhancing space assets protection.
An ambitious agenda anchored in competitiveness, values and security is being pursued by the Irish Presidency with EU Space positioned as a key instrument in delivering Europe’s strategic resilience and innovation.
Around 50 members gathered in mid-June in Prague to reinforce cooperation across the European space sector, enhance cybersecurity resilience and advance strategic priorities.